
The working principle and its composition include (M4R working principle, M4R composition) M4R Mathematical Model (coordinate system definition)
How it works in M4R: the basic structure of M4R is shown in figure 2.1. Four spins of M4R
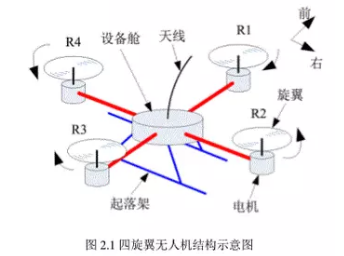
The wings are arranged in four vertices of the cross-shaped airframe and are divided into two groups of clockwise rotation (1,3) and anticlockwise rotation (2,4) . When the four rotors rotate at the same speed, they cancel each other's counter torque.
M4R has the following basic forms of controllable motion:
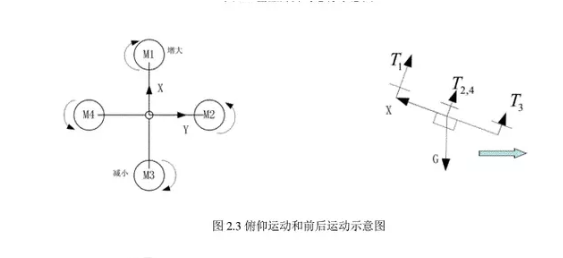
1. Vertical lift and hover: increasing or decreasing the speed of four rotors simultaneously changes the amount of lift applied to the M4R, when the total lift is greater or less than the gravity of the M4R itself, m4R moves vertically up or down: when the total lift is equal to its own gravity, M4R hovers. The vertical lift and hover controls are shown in figure 2.2.
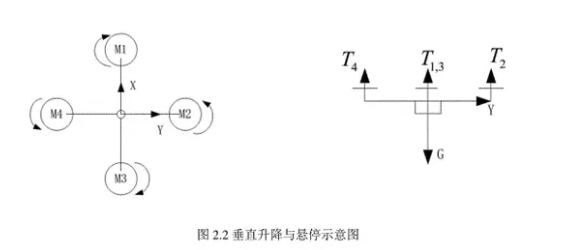
2. Pitching and forward/backward motion when rotors 2 and 4 are fixed, rotors 1 increase (decrease) , rotors 3 decrease (increase) , and the difference in rotations 1 and 3 causes the UAV to head up (head down) , this allows the lift to be weighed along the x-axis, allowing for backward (forward) flight. The detailed motion diagram is shown in figure 2.3.
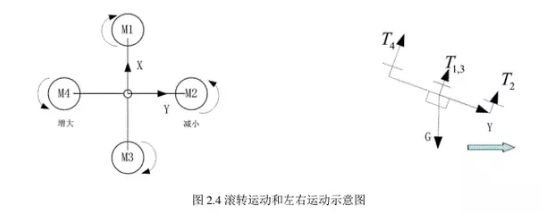
3. Roll motion and left-right motion when rotors 1 and 3 are fixed, rotors 2 are reduced (increased) , rotors 4 are increased (decreased) , and uavs fly right (left) . The difference in speed between the motors 2 and 44 causes the drone to lean to the right (left) , thus generating lift components along the y direction, and thus flying to the right (left) . The detailed motion diagram is shown in Figure 2.4.
Four. Yaw motion when rotors 1 and 3 increase (decrease) and rotors 2 and 4 decrease (increase) , the UAV achieves left yaw (right yaw) flight.
In the M4R composition: M4R by rotor, brushless motor, brushless electrical regulation, power, landing gear, flight controller, remote control receiver, GPS receiver and airframe components [8] . The components function as follows:
1. The actuator of M4R consists of four pairs of BLDCM and BLDCM. The actuator receives control from the flight controller to drive the motor to drive the rotor rotation, providing all the lift required for flight for the M4R. By changing the rotation speed of the 4 rotors, the flying attitude of the UAV is changed, and the UAV can move forward, backward and yaw
2. Flight control system, M4R flight control system is composed of flight control computer, attitude reference system, remote control receiver, GPS receiver, etc. . Because the rotor-wing UAV is greatly affected by vibration, in order to obtain the correct flight attitude angle, the above components must be installed on the fuselage by means of rigid connections, and the corresponding vibration reduction measures must be taken. 3. Airframe and landing gear, M4R airframe made of carbon fiber material, landing gear made of aluminum alloy plate. The landing gear is connected to the fuselage in a cross-shaped distribution, and the landing gear at a certain height can reduce the influence of ground effect on the take-off and landing of uavs.
The mathematical model in M4R:
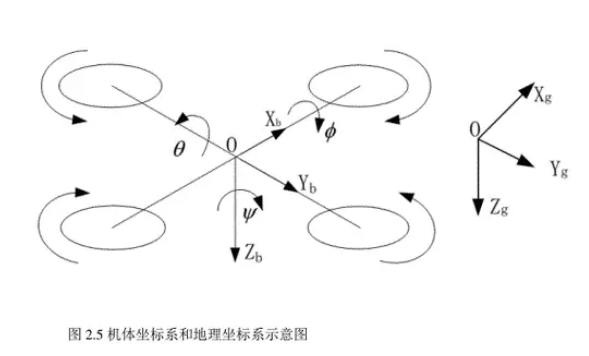
Coordinate system definition
The common coordinate systems include geographical coordinate system, airframe coordinate system, air flow axis coordinate system, speed coordinate system, track coordinate system, etc. . The motion of M4R consists of angular motion around three axes and motion along lines of three axes. In order to describe its rotation, the body coordinate system or the speed coordinate system must be selected, and the geographical coordinate system must be selected in order to determine the specific flying position. Therefore, this paper selects the ground coordinate system and the body coordinate to carry on the mathematical modeling. Figure 2.5 shows the body coordinates o, x, y and geographic coordinates o, x, y 2.



©All rights reserved 2014-2022 Xeme airline technology(Shandong) Group Co., Ltd LuICPRecord number:2024078815-1